Granular Dynamics of Robot Articulated Sensing
 While a robot’s primary structure provides the reach, the individual components at the points of contact and articulation determine the success of complex maneuvers.
While a robot’s primary structure provides the reach, the individual components at the points of contact and articulation determine the success of complex maneuvers.
Multi-axis sensors are ideal for testing the structural anatomy of a robot, including its joints, grippers, and specialized end-effectors. The robot transformation has redefined how design engineers and robot test labs approach precision, shifting the focus from testing isolated, single components to defining articulation itself. Robots require detailed analysis and accurate measurements of the mechanical motion as it transforms into perceptive interaction.
The Journey of Robot Testing from Single to Multi-Axis Sensors
The evolution of industrial robotics has shifted from rigid, blind repetition to dynamic, sensor-driven interaction. Early robotic systems were largely defined by their mechanical constraints: simple Cartesian or gantry structures designed to move between fixed coordinates with high repeatability but with zero environmental awareness. These first-generation machines relied on basic limit switches and encoders that tracked position alone, assuming a static world where every part was exactly where it was programmed to be.
As industries demanded higher throughput and the ability to handle more complex, non-linear tasks, these simple robot types evolved. Robots grew from rigid frames into multi-jointed, articulated structures that mimic human movement, requiring a fundamental shift from monitoring the robot’s location to sensing its interaction.

It is no longer a focus on simple measures of a motor’s accuracy. Robots today require detailed sensing across multiple axes of motion. Where robot testing historically used a single load cell to verify vertical forces, engineers now define articulation using synchronized data from 3-axis and 6-axis sensors embedded at every pivot and grip point. This transition ensures that as a robot arm reaches, rotates, and grasps, the system isn’t just following a path. It is perceiving the shifting centers of gravity, frictional resistance, and contact forces in real-time.
Robot Components Requiring Multi-Axis Testing
To ensure the longevity and safety of these systems, individual components must undergo rigorous multi-axis testing to simulate the non-linear forces encountered in real-world environments. Here are five examples of robot components that use multi-axis sensors for testing and monitoring performance:
- Robot Flanges and Wrists: Testing the mounting interface between the arm and the end-effector to ensure it can withstand combined torsional and axial loads during high-speed pick-and-place cycles.
- Rotary and Pivot Joints: Validating that internal bearings and motor housings can manage moment loads, the twisting forces that occur when the arm is fully extended or carrying an offset payload.
- Multi-Finger Grippers and End-of-Arm Tooling (EOAT): Assessing the sensitivity of miniature 3-axis sensors to ensure they accurately detect lateral slip and contact forces without interference from the gripper’s own clamping mechanism.
- Haptic Feedback Controls: Testing the bi-directional force response in surgical or remote-operated robot handles to ensure the operator receives accurate tactile data.
- Base Mounts and Leveling Feet: Utilizing 3-axis force plates at the robot’s foundation to monitor shifting centers of gravity and ensure the entire system remains stable under peak dynamic loads.
This level of granular analysis, from humanoids to undersea explorers, is made possible by integrating Interface’s multi-axis sensors with specialized instrumentation and software.
Intelligent End-Effectors and Grippers
The interface between a robot and its workpiece is the most critical point for multi-axis data integration. Grippers equipped with force-torque sensors move beyond simple open-close logic to achieve variable-force tensioning.
- Grasping measurements in compact end-of-arm tooling (EOAT) are easier to understand using the Interface 3A40 Miniature 3-Axis Load Cell. This sensor provides the necessary vertical force feedback and lateral resistance detection without adding significant mass. This allows grippers to handle delicate electronics or medical vials with a calibrated touch, preventing structural deformation. Here is an example of how a robotic hand is tested using multi-axis sensors.

- Slip detection requires high-speed processing to identify the micro-vibrations and shear forces that precede a slip. Multi-axis sensors can provide complete real-time data views of these forces. By utilizing an Interface BX8-HD44 BlueDAQ Series data acquisition system, robot designers can process multi-channel signals simultaneously, enabling the controller to increase clamping force in milliseconds.
Force-Aware Articulated Joints
In robots with rotating or pivoting elements, sensors integrated into joints provide an additional layer of telemetry beyond standard motor encoders.
- Complex load monitoring using 6-Axis Load Cells, placed at the wrist or major pivot points of a robotic arm, measures all three force vectors and all three moments. This ensures that the joint can distinguish between the intended payload weight and extraneous torque caused by external obstructions or mechanical binding.

- Dynamic center of gravity (CoG) compensation, as an arm articulates through its range of motion, is measured by the multi-axis sensor. The BX8 DAQ system performs real-time scaling and math channel calculations. This allows the system to subtract the known weight of the arm (tare) to isolate the exact forces being applied to the workpiece, regardless of the arm’s orientation in 3D space. Check out the 6A Series BX8 Complete System.
Specialized Finishing Heads
For tasks like deburring, sanding, or grinding, the tool head itself becomes a sensor-rich component.
- Surface contouring in finishing operations necessitates a constant force against a curved surface, which is difficult with rigid programming. A tool head with an Interface 3-axis sensor provides feedback on the normal force (the force perpendicular to the surface). This ensures that as the robot moves across a complex part, the tool doesn’t gouge the material or lift away, resulting in a uniform finish. Another example of robots for finishing is detailed in our application, Robotic Grinding and Polishing.
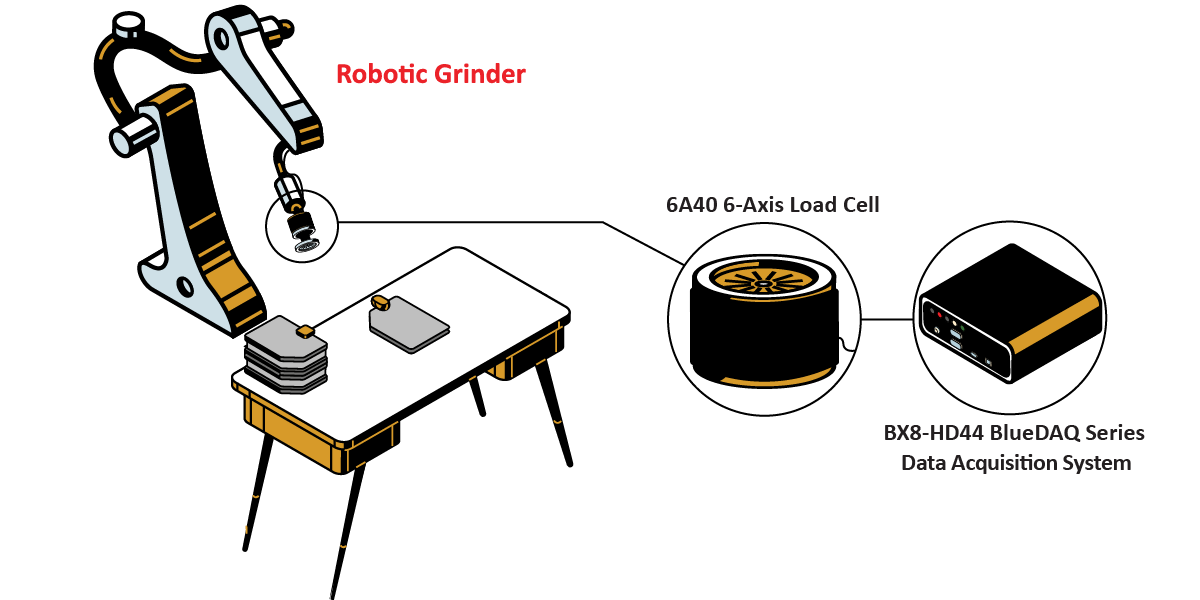
- Tool wear diagnostics are managed using BlueDAQ software; engineers can monitor for shifts in the torque-to-force ratio. An increase in rotational resistance (torque) without a corresponding increase in downward force often indicates tool dulling or material buildup, allowing for proactive tool replacement before part quality is compromised.
Active Suspension and Base Modules
For large-scale robots, sensing at the foundation or carriage level governs the physics of high-speed motion.
- Inertia and stability during rapid deceleration can cause a shift in a heavy load, creating complex force couples. Interface multi-axis sensors installed at the mounting interface between the base and the robot tool detect these inertial shifts. This data allows the robot to adjust its acceleration curves dynamically, dampening oscillations that could lead to mechanical fatigue.
- Navigation and obstacle detection on mobile platforms using multi-axis sensors integrated into a mobile robot provide critical data. If a robot strikes a minor floor obstruction, the sensor detects the impact vector and magnitude, allowing the system to determine if it is safe to proceed or if an emergency stop is required.
By focusing on the granular data generated at every joint and fingertip, industry leaders are moving beyond simple automation toward truly intelligent, tactile machines. Through the integration of high-precision multi-axis sensors and synchronized data acquisition, the next generation of robotics will not only move with greater speed and strength but with the nuanced sense of touch required to navigate an increasingly complex physical world.
ADDITIONAL RESOURCES
X-Y-Z Robots and Multi-Axis Sensors are Advancing Automation