Solution
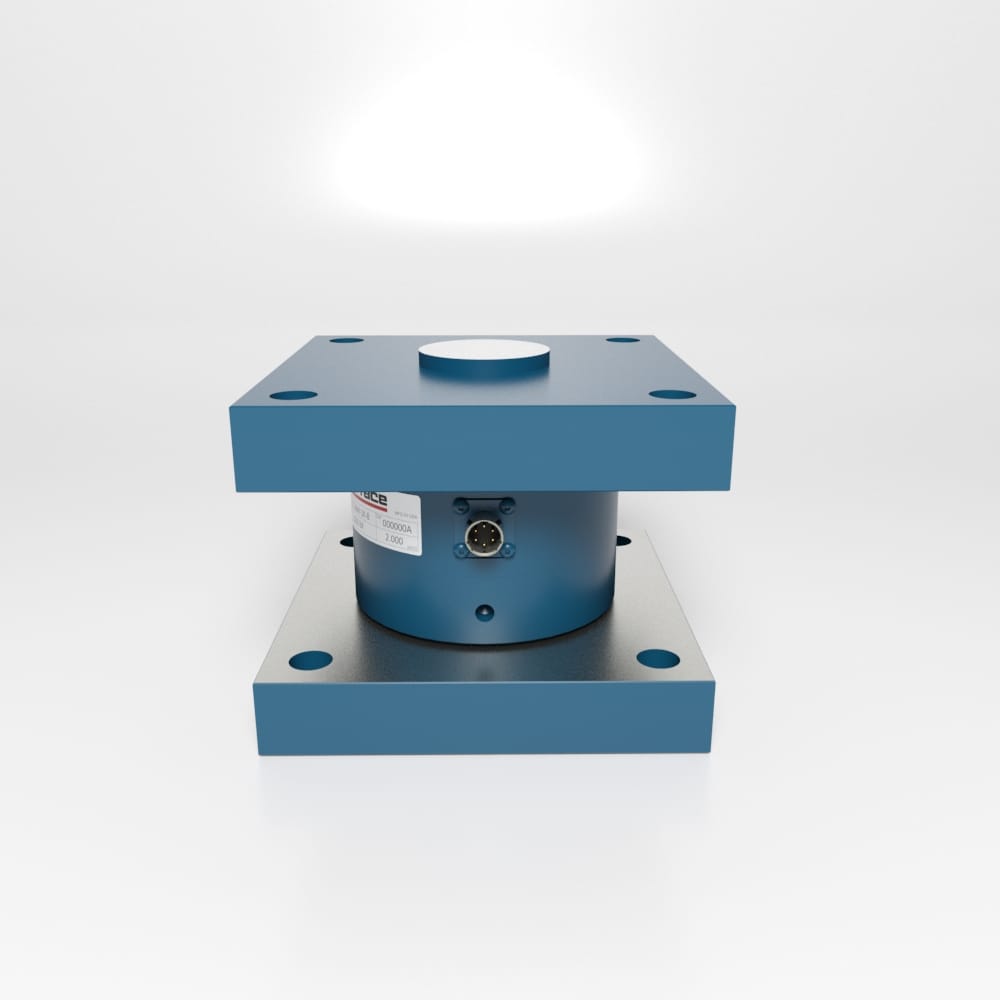
Cobot Safety Programming
Collaborative robots, or cobots, are offering more manufacturing operations in the industrial packaging industry. Protective cages or fences are no longer needed for safety purposes, but safety testing are still needed to ensure humans and robots can work alongside each other.