Specifications
Specifications
6A55RI SPECIFICATIONS
|
Accuracy – (max error) |
|
Nonlinearity – %FS |
± 0.2 |
|
Hysteresis – %FS |
± 0.2 |
|
Nonrepeatability – %RO |
± 0.2 |
|
Creep, in 20 min – % |
± 0.1 |
|
Crosstalk – % |
1 |
|
Temperature |
|
Effect on Zero – %RO / deg - °C |
± 0.2 |
|
Effect on Output – % / deg - °C |
± 0.05 |
|
Operating Range |
°C |
-10 to +85 |
|
°F |
+14 to +185 |
|
Electrical |
|
Signal |
EtherCAT |
|
Mechanical |
|
Safe Overload – %CAP |
300 |
|
Ultimate Overload – %RO |
600 |
|
Cable Length |
m |
5 |
|
ft |
16.4 |
U.S. dimensions and capacities are provided for conversion only. Standard product is metric. U.S. capacities available upon special request and at an additional cost.
Characteristics
Characteristics define the maximum forces and torques the sensor can accurately and safely measure, as well as its physical dimensions, construction, and resilience to the operating environment factors that are crucial for proper mechanical integration.
6A55RI CHARACTERISTICS
|
See Drawing |
MODEL |
|
6A55RI |
6A55RI |
6A55RI |
6A55RI |
6A55RI |
|
A |
B |
C |
D |
E |
|
Fx (N) |
50 |
100 |
200 |
500 |
1000 |
|
Fy (N) |
50 |
100 |
200 |
500 |
1000 |
|
Fz (N) |
100 |
200 |
400 |
1000 |
2000 |
|
Mx (Nm) |
5 |
10 |
20 |
25 |
40 |
|
My (Nm) |
5 |
10 |
20 |
25 |
40 |
|
Mz (Nm) |
5 |
10 |
20 |
25 |
40 |
|
Diameter (mm) |
55 |
55 |
55 |
55 |
55 |
|
Height (mm) |
50 |
50 |
50 |
50 |
50 |
|
Weight (g) |
221 |
221 |
221 |
221 |
221 |
|
Material |
Aluminum Alloy |
Aluminum Alloy |
Aluminum Alloy |
Aluminum Alloy |
Aluminum Alloy |
|
Protection (IP) |
65 |
65 |
65 |
65 |
65 |
|
Robotic Flange Type |
ISO 9409-1-31.33-4-M5 |
ISO 9409-1-31.33-4-M5 |
ISO 9409-1-31.33-4-M5 |
ISO 9409-1-31.33-4-M5 |
ISO 9409-1-31.33-4-M5 |
Standard configuration includes a replaceable 5-meter cable with M8 EhterCAT P connector.
Dimensions
Dimensions
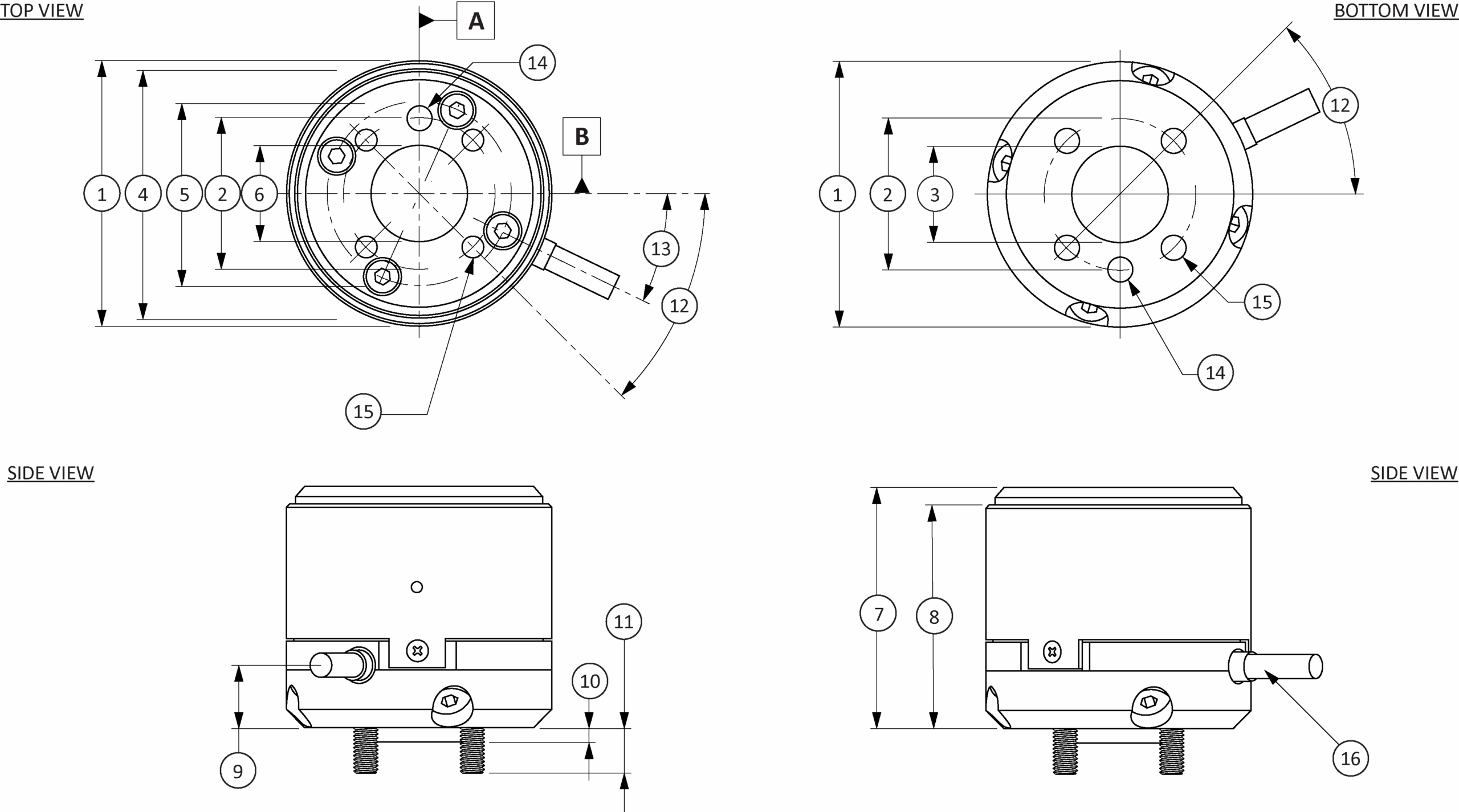
6A55RI Dimensions
|
See Drawing |
Metric |
U.S. |
|
mm |
in |
|
(1) |
Ø55.0 |
Ø2.17 |
|
(2) |
Ø31.33 |
Ø1.23 |
|
(3) |
Ø20.0 |
Ø0.79 |
|
(4) |
Ø51.0 |
Ø2.01 |
|
(5) |
Ø38.0 |
Ø1.50 |
|
(6) |
Ø20.0 F7 |
Ø0.79 F7 |
|
(7) |
50.0 |
1.97 |
|
(8) |
46.5 |
1.83 |
|
(9) |
13.0 |
0.51 |
|
(10) |
3.0 |
0.19 |
|
(11) |
ca. 9.4 |
ca. 0.37 |
|
(12) |
45° |
|
(13) |
26° |
|
(14) |
Ø5 H7 +0.012 ↧ 6 ⊕ Ø0.02 A B |
Ø0.2 H7 +0.0005 ↧ 0.24 ⊕ Ø0.0008 A B |
|
(15) |
4 x Ø4.20 ↧ 6 M5 - 6H ↧ 5.20 |
4 x Ø0.17 ↧ 0.24 M5 - 6H ↧ 0.20 |
|
(16) |
Connection Cable EtherCAT-P 4p/Shielded/p-coded 5m with M8 Connector ZS7000-0002 |
Connection Cable EtherCAT-P 4p/Shielded/p-coded 16.4 ft with M8 Connector ZS7000-0002 |
U.S. dimensions and capacities are provided for conversion only. Standard product is metric. U.S. capacities available upon special request and at an additional cost.
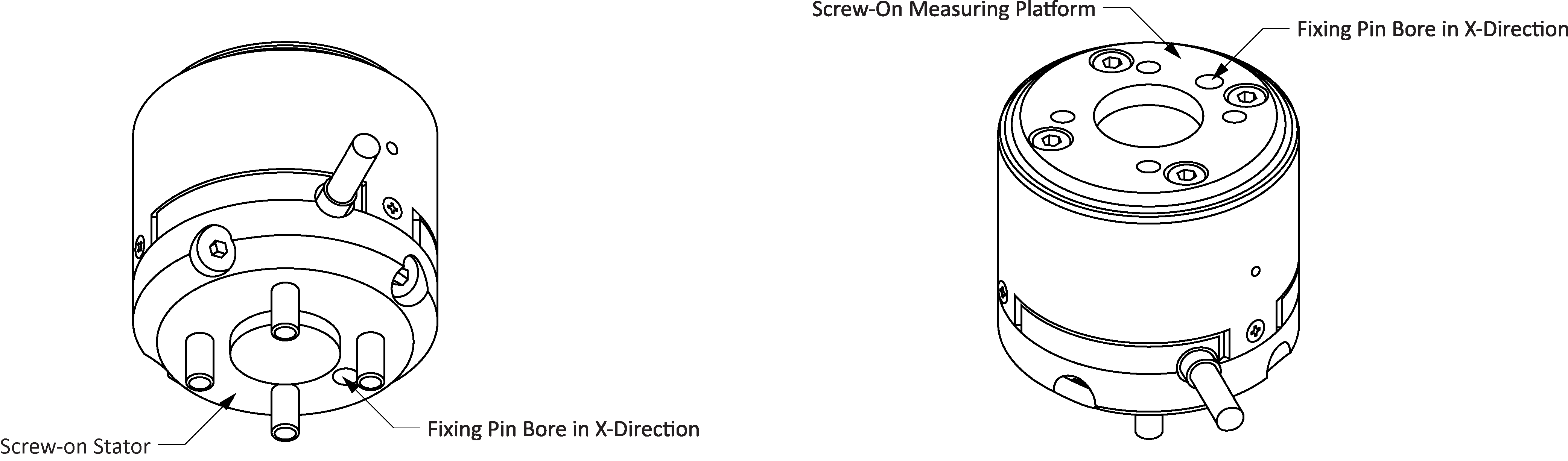
Mounting Diagram
Connector Pin Diagram
6A55RI Connector Pin Diagram
|
Signal |
Function |
Pin-No. M8 connector |
Pin-No. RJ45 |
|
TD+ |
Transmit data +, GNDs |
1 |
1 |
|
TD- |
Transmit data - , Us:+24VDC |
4 |
2 |
|
RD+ |
Receive data + |
2 |
3 |
|
RD- |
Receive data - |
3 |
6 |
The device requires an EtherCAT P power source device, that superimposes the supplying DC and splits the Ethernet signals for the EtherCAT master.
For more information visit Electrical Wiring Diagrams