Solution
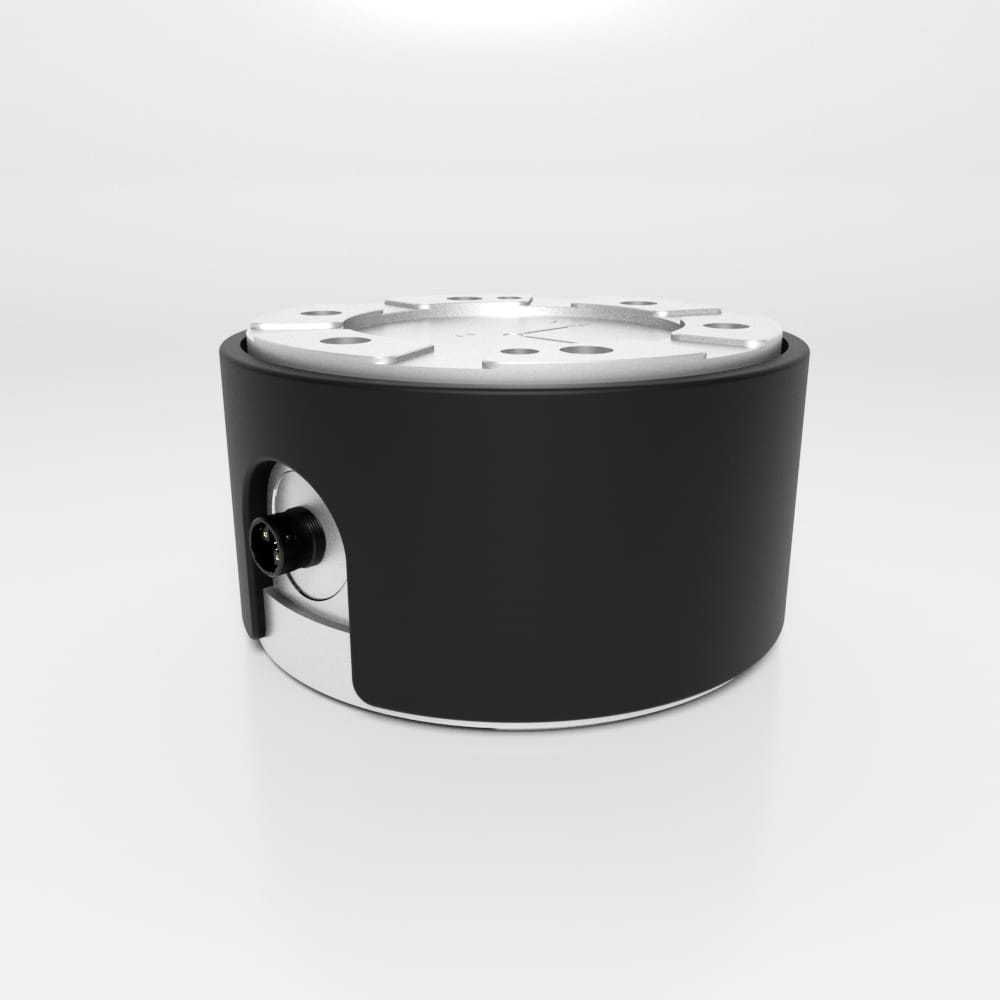
Cobot Palletizer
Collaborative robots, or cobots, are used for processing in manufacturing environments by stacking products or items onto pallets in an organized fashion either for storage, transportation, or distribution. A system is needed to measure the force and torque of the cobot arm as it picks up and lifts objects onto the pallet.